TX077 科学技術の進歩が、私達の日々の生活に役に立っている
今日の技術情報提供は、Tinyロボットと、宇宙衛星を活用したコミュニケーションのコネクティビティを維持させるために必要とされる、宇宙のごみ掃除テクノロジーの記事のコピーです。
1.世界最小の遠隔操作型歩行ロボットを開発
Tiny robotic crab is smallest-ever remote-controlled walking robot
by Staff Writers
Chicago IL (SPX) May 27, 2022

ノースウェスタン大学の技術者たちが、史上最小の遠隔操作型歩行ロボットを開発しました。このロボットは、小さくて愛らしいPeekytoeカニの形をしています。
幅わずか0.5ミリのこの小さなカニは、曲げたり、ねじったり、這ったり、歩いたり、回ったり、さらにはジャンプしたりすることができます。研究者らは、尺取虫、コオロギ、カブトムシに似たミリメートルサイズのロボットも開発しています。現時点では探索的な研究ですが、研究者らは、この技術によって、狭い空間で実用的な作業を行うマイクロサイズのロボットの実現に近づくことができると考えています。
この研究成果は、5月25日(水)に学術誌「Science Robotics」に掲載される予定です。昨年9月には、同じチームが、人類史上最小の飛行構造体である翼のあるマイクロチップを発表しています(『Nature』の表紙で発表)。
「ロボット工学はエキサイティングな研究分野であり、マイクロスケールのロボットの開発は学術的に楽しいテーマです」と、実験研究を率いたジョン A. ロジャーズは語っています。「マイクロロボットは、産業界で小さな構造物や機械を修理したり組み立てたりするエージェントとして、あるいは、詰まった動脈を取り除き、内出血を止め、癌腫瘍を除去する手術のアシスタントとして、すべて低侵襲な手術で活躍することが想像できるかもしれません”。
「私たちの技術は、さまざまな制御された運動様式を可能にし、1秒間に体長の半分の平均速度で歩くことができます」と、理論研究を率いたYonggang Huangは説明し、さらに「これは、地上型ロボットとして、非常に小さなスケールで実現するのは非常に困難なことですと付け加えました。
バイオエレクトロニクスのパイオニアであるロジャーズは、ノースウェスタン大学マコーミック工学部およびファインバーグ医学部の材料科学・工学、生体医工学、神経外科のルイス・シンプソンおよびキンバリー・クエリー教授、クエリーシンプソンバイオエレクトロニクス研究所(QSIB)の所長を務めています。Huang(黄)は、マコーミック校の機械工学および土木環境工学のジャン&マーシャ・アッシェンバッハ教授であり、QSIBの主要メンバーでもあります。
ノミよりも小さなカニは、複雑なハードウェアや油圧、電気で動いているわけではありません。その代わり、そのパワーは、体の弾力的な回復力に求めています。このロボットを作るために、研究者たちは、熱を加えると記憶した形に変化する形状記憶合金材料を使用しています。今回は、レーザービームを走査して、ロボットの体内の、狙った場所を高速で加熱しました。冷却すると、ガラスの薄い膜がその部分を弾性的に変形させ、元の形状に戻ります。
ロボットが変形して形状を記憶し、また元に戻るというように、ある段階から別の段階へと変化することで、ロコモーションを作り出します。レーザーを遠隔操作してロボットを動かすだけでなく、レーザーのスキャン方向でロボットの歩く方向も決まります。例えば、左から右へスキャンすると、ロボットは右から左へ移動します。
「これらの構造体は非常に小さいため、冷却速度が非常に速いのです」とロジャーズは説明する。「実際、これらのロボットのサイズを小さくすることで、より高速に動作させることができます。
このような小さな生き物を作るために、ロジャースとフアンは、8年前に紹介した技術、つまり子どもの飛び出す絵本にヒントを得た飛び出し式組み立て法に着目しました。
研究チームはまず、歩くカニの構造体の前駆体を、平らな平面形状で作製し、次に、この前駆体を、わずかに伸ばしたゴム基板に貼り付けました。伸ばした基板をリラックスさせると、制御された座屈プロセスが起こり、カニが正確に定義された3次元形状に「飛び出します」。
この製造方法を使えば、ノースウェスタン大学の研究チームは、さまざまな形や大きさのロボットを開発することができます。では、なぜ「Peekytoe Crab – のぞき見カニ」なのか?それは、ロジャース教授と黄教授の学生たちに感謝しなければならない。
”このような組み立て技術と材料のコンセプトがあれば、ほとんどどんなサイズや3D形状の歩行ロボットも作ることができます。”とロジャーズ教授は話しています。「しかし、学生たちは、小さなカニが横に這う動作にインスピレーションと面白さを感じました。それは (Peekytoe Crabとなずけたのは)、創造的な気まぐれだったのです。”
参考文献:Research Report: Submillimeter-scale multimaterial terrestrial robots
2.宇宙における持続可能なコネクティビティー
Sustainable connectivity in space
by Staff Writers
Paris (ESA) May 29, 2022
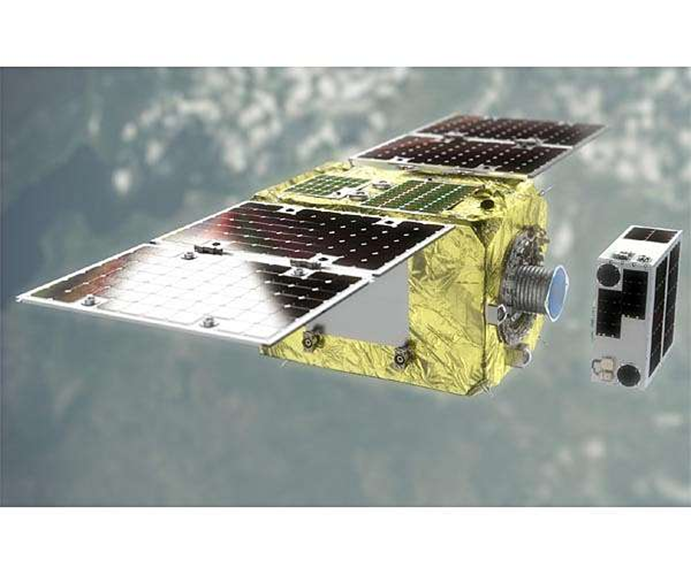
複数の小型通信衛星が運用を終えたら軌道上から撤去するという世界初のミッションが、そのプロトタイプ宇宙船の製造とテストを開始しようとしています。
英国を拠点とする軌道上サービシング企業Astroscale社は、衛星運用会社OneWeb社とのESAパートナーシップ・プロジェクトで、ESA Sunriseプログラムのもと、地球低軌道にある複数の衛星を捕捉するために設計された、最初の商業用「サービサー」プロトタイプの製造を開始します。OneWebのような企業は、何百もの通信衛星で構成される星座を打ち上げ、グローバルな衛星インターネットブロードバンドサービスを通じて、最も到達しにくい場所にいる人々をつないでいます。
OneWebは、現在428基の衛星を上空約1200kmの軌道で周回させており、完成すると約650基の衛星が設置される予定です。これらの通信衛星が寿命を迎え、軌道から取り外すことは、今日の相互接続されたデジタル世界が、宇宙で活動する衛星にダメージを与える衝突によって損なわれないようにするため、また、自然資源および共有資源としての地球低軌道環境を保護するために不可欠です。
5〜6年の寿命を迎えたOneWeb衛星を軌道上から撤去するには、現在2つの選択肢があります。
各衛星には、寿命が尽きたときに積極的に軌道をはずすことができるよう、十分な燃料が割り当てられています。しかし、万が一の故障の際には、衛星を回収して能動的に軌道をはずすことができるよう、各衛星には磁気固定装置または把持装置が取り付けられています。
今回、アストロスケールが製作・試験するサービサー宇宙船は「ELSA-M」と呼ばれ、2024年の打ち上げが予定されています。このサービサー宇宙船は、1回のミッションで複数の廃衛星を軌道から取り外すことができる初の「スペーススイーパー」となる予定です。
この実証実験の後、アストロスケールは、地球低軌道で衛星コンステレーションを運用する顧客向けに商業サービスを提供し、2030年までに軌道上保守を通常の衛星運用の一部にするための技術と能力を提供します。
ESAは、市場のニーズに合わせて産業界のパートナーの投資のリスクを軽減しようとするパートナーシップ・プロジェクトを通じて、欧州宇宙産業のイノベーションを促進しています。
英国のジョージ・フリーマン科学大臣は次のように述べています。「すでに何千もの衛星が軌道上にあり、毎年何千もの衛星が打ち上げられる中、スペースデブリの問題に取り組み、使用済みの宇宙船やその他の種類の宇宙ゴミを除去する新しい方法を見つけることは、衛星オペレータのデブリ被害のコストを削減し、宇宙の安全性と持続性を確保するために、ますます重要性を増している。
「このため、英国政府は宇宙の持続可能性を国家宇宙戦略の主要テーマとしています。このESAプロジェクトで英国企業のアストロスケールとワンウェブが主導的な役割を果たし、この重要な分野で英国の技術リーダーシップを示し続けることに貢献していることは、素晴らしいことです。
英国宇宙庁の最高責任者であるPaul Bateは、次のように述べています。「スペースデブリは、ナビゲーション、銀行、通信などの重要なサービスのために私たちが毎日利用している衛星を脅かしています。
「そのため、英国は、宇宙からデブリを除去するための新しい商業技術に資金を提供し、国際的なパートナーと協力して、持続可能性を促進する取り組みを主導することで、行動を起こしているのです。アストロスケールとワンウェブによるサンライズ計画のパートナーシップのこの最新段階は、複数の廃衛星を除去する革新的な宇宙船サービサーを提供し、英国を宇宙の撤去努力の最前線に置くことになります。
”OneWebの最高技術責任者であるMassimiliano Ladovazは、次のように述べています。「責任ある宇宙活動は OneWeb のミッションの中心であり、私たちが活動するすべての環境において持続可能な実践に取り組んでいます。ELSA-Mサービサーのプロトタイプの開発は、責任ある宇宙へのアプローチに向けたもう一つの重要なマイルストーンであり、我々の衛星が軌道から外れ、地球低軌道環境が天然および共有資源として保護されることを保証するものです。
アストロスケールのマネージングディレクターであるジョン・オーバーン氏は、次のように述べています。「サンライズ計画の第3段階は、軌道上での実証と、1回のミッションで複数の衛星を取り外すことができる商業的なデブリ除去サービスの開始に向けて、ELSA-Mにとって大きな前進となるものです。2024年後半に予定されているELSA-Mの軌道上実証は、ELSA-dミッションから学んだ教訓を基に、フルサイズの衛星群クライアントで革新的なランデブー、捕捉、軌道離脱能力を実証します “と述べています。
ESA の通信・統合アプリケーション担当ディレクターである Elodie Viau 氏は、次のように述べ ています。「今日の相互接続された世界を守るために、宇宙の責任ある利用を確保することは極めて重要です。なぜなら、私たちのデジタル経済と社会は、通信能力に依存しているからです。私は、ヨーロッパの宇宙産業におけるイノベーションを促進し、宇宙の持続可能な利用を確保するための新しい方法を実現するESAの実績と、ESAのパートナーシッププロジェクトが投資家、事業者、産業界にとって信頼できるパートナーとして果たす役割を誇りに思います。”と述べています。ESA Sunriseプログラムは、英国宇宙局の支援を受けており、OneWebとAstroscaleだけでなく、英国のスタートアップ企業SatixFyとCelestia UK、そしてサリー大学も参加しています。
Related Links
Telecommunications and Integrated Applications at ESA
Space Technology News – Applications and Research
Best regards,
Shoichi Sugiyama, Ph.D.